

Description:
Required Skills: research and design skills
Required Software: rhino, unity (will cover during the workshop)
Maximum number of participating students: 100
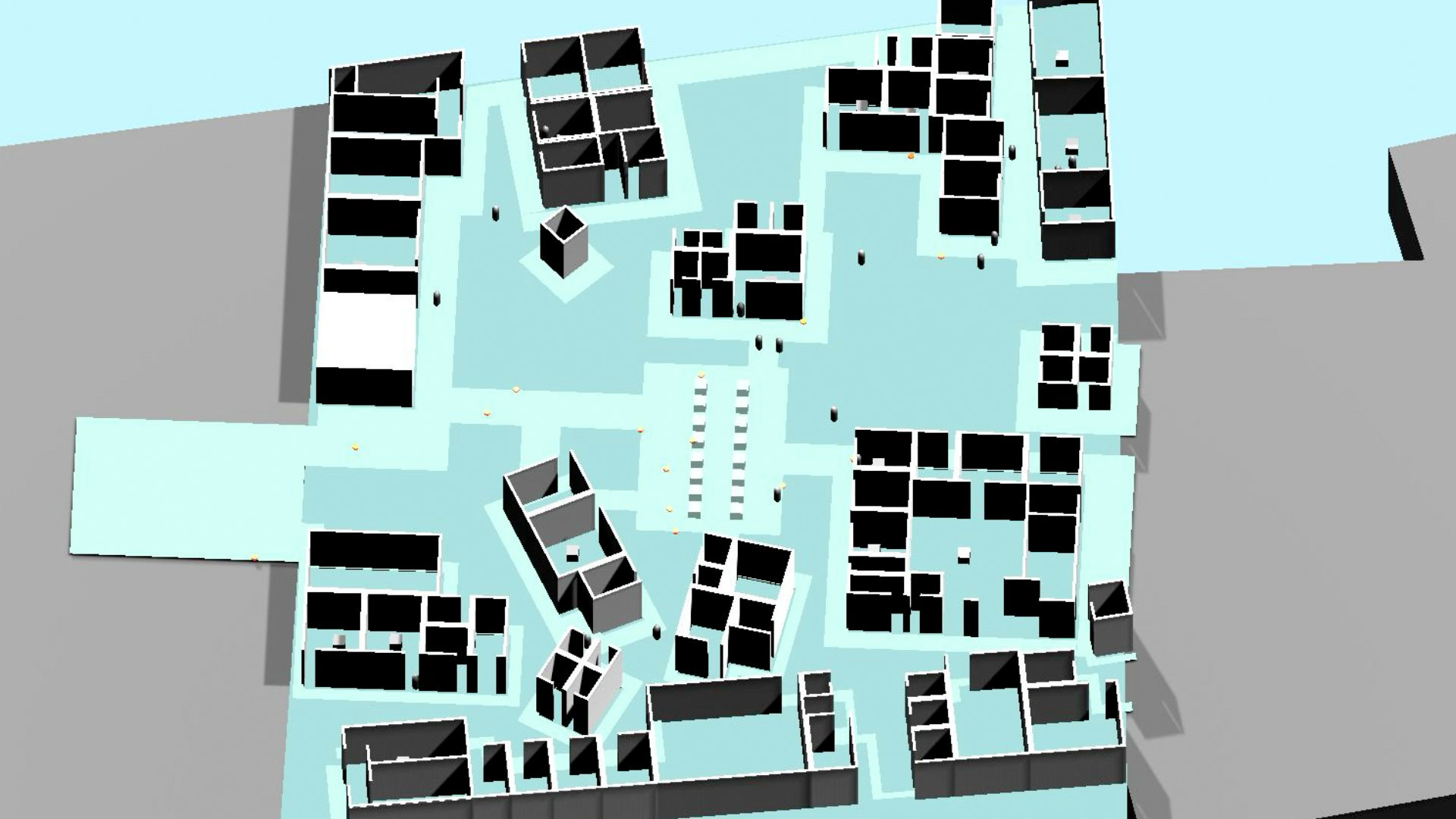
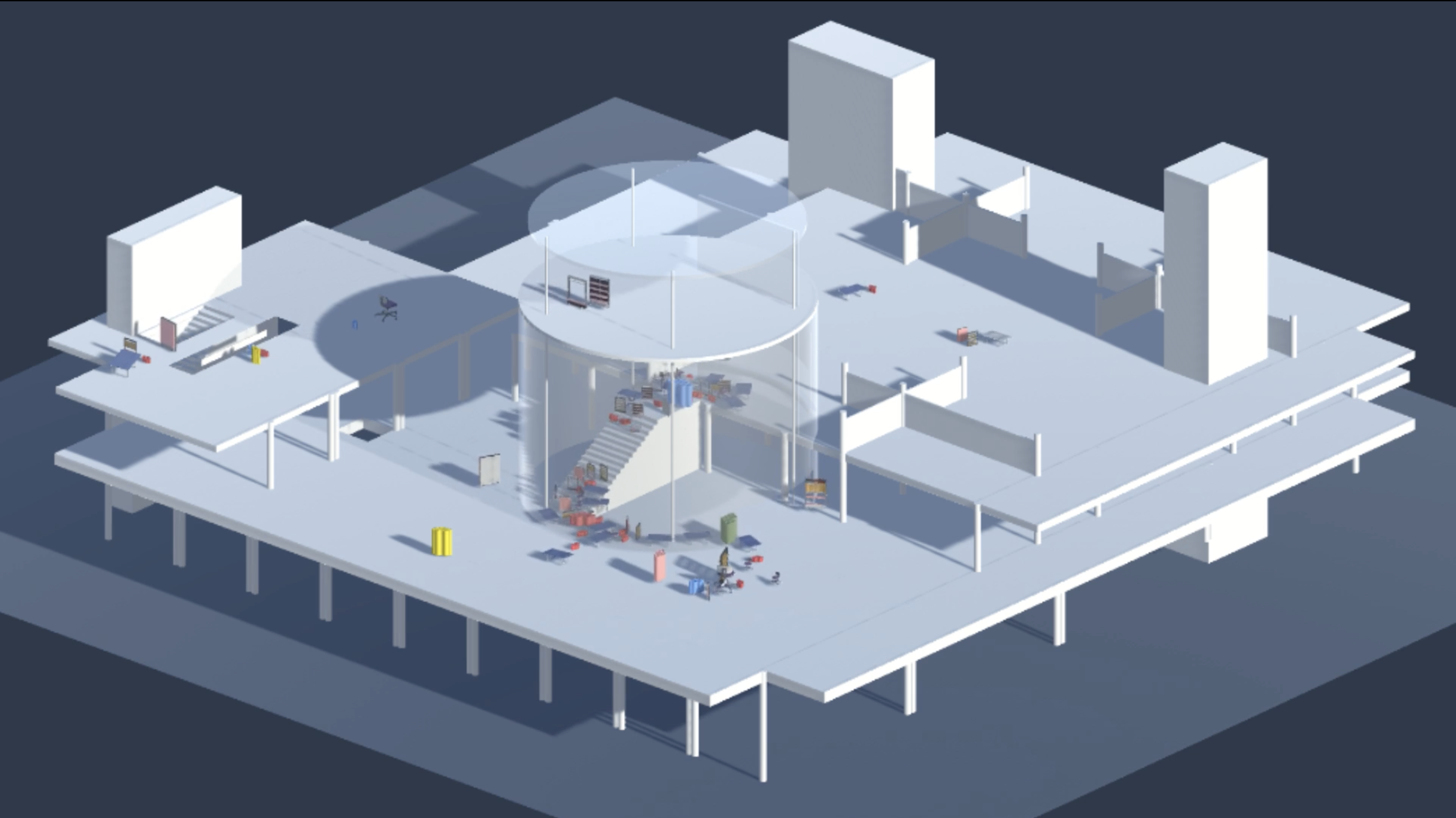
As the third workshop offered to DigitalFUTURES, on artificial intelligence and machine behavior, we will engage with the design of crowd robots not by reading, designing, and scripting, but by gaming. Instead of predefining the execution path, behavior-based fabrication means accomplishing the task by executing a series of tasks. If the goal or task is given, how an autonomous robotic system can perform rather than giving a top-down control. Considering the difference between a BIM-based construction or 3D layered print vs goal-oriented construction like LEGO assembly. In the scenario of crowd movement, new ideas of intelligence might emerge and that is what we are interested in this workshop. As machine behavior cannot be fully understood without the integrated study of algorithms and the social environments in which robots operate, in this workshop we invite students not to be designers but operators. At the beginning of the workshop, students will be given a simulation package built by the instructor in the game engine environment of Unity, where the number of robots, the speed, angular speed, and the mode of constructing an element are predefined. The robot, although in simulation it exists virtually, is equipped with two essential functions which make it a simulation, A* algorithm for path planning and goal searching. The students will need to control the robots, not by joysticks, but by defining their behavior tree and testing swarm intelligence, as the robots will not be scripted individually but categorically. Students will engage with the game and design throughout the gaming process during the whole week, and the evaluation is the fabricated area within a certain amount of time. During the workshop, in order to build the most amount of area, we will learn from other fields, from what seemly close to what we are doing like kilobot from Harvard Robotic Lab, micro robotics that can dive into our blood vessels, to biological phenomena such as swarm behavior and predatory behaviors. 作为提供给DigitalFUTURES的第三个工作营,我们将延续对人工智能和机器行为的讨论。今年,对于集群机器人的设计,不是通过阅读、设计和脚本,而是通过游戏。基于行为的制造不是预先定义执行路径,而是通过执行一系列的任务来完成任务。如果目标或任务已经给出,自主机器人系统如何执行,而不是给一个自上而下的控制,对比下基于BIM的建筑或3D分层打印与乐高组装等目标导向的建筑之间的区别。在集群运动的场景中,可能会出现新的智能理念,这也是我们在本次工作营上感兴趣的地方。 由于没有对算法和机器人运行的社会环境的综合研究,就不能完全理解机器的行为,在这个工作营中,我们邀请学生成为操作者/玩家,而不是构造方/设计师。 在研讨会开始时,学生将得到一个由教师在Unity的游戏引擎环境中建立的模拟包,其中机器人的数量、速度、角速度和构建元素的模式都是预先定义的。机器人虽然在模拟中是虚拟存在的,但它配备了两个使其成为模拟的基本功能,即A*算法的路径规划和目标搜索。学生需要控制机器人,不是通过操纵杆,而是通过定义它们的行为树和测试蜂群智能,因为机器人不会被单独编写脚本,而是分类编写的。在整个一周的游戏过程中,学生将参与游戏和设计,评价是在一定时间内的制作区域。 在工作营期间,为了建造最多面积,我们将从其他领域学习,从看似接近我们正在做的事情,如哈佛大学机器人实验室的kilobot,可以潜入我们血管的微型机器人,到生物现象,如蜂群行为和掠夺行为。

Schedule:
timezone: (GMT +1:00) Brussels, Copenhagen, Madrid, Paris| Start time | End time | Description |
|---|---|---|
| 2022-06-27 - 09:30 | 2022-06-27 - 11:00 | Workshop Kick-off Lecture |
| 2022-06-28 - 10:00 | 2022-06-28 - 12:00 | Unity Introduction and Path Planning |
| 2022-06-29 - 10:00 | 2022-06-29 - 12:00 | 5 Robot Simulation Review |
| 2022-06-30 - 10:00 | 2022-06-30 - 10:00 | 20 Robot Simulation Review |
| 2022-07-01 - 10:00 | 2022-07-01 - 12:00 | 50 Robot Simulation Review |
Instructors:
 |
kaihoyu | Kaiho Yu is an Assistant Professor of Architecture at University of Applied Arts Vienna, and the co-founder of Direct Tomorrow Lab (Dtl), a research incubator based in Vienna. From 2020, he started to co-curate the Sliver Lecture Series at the Institute of Architecture. Previously he has taught at UCLA and SCI-Arc. He holds a Master of Architecture from SCI-Arc. Kaiho’s research and practice focus on the realm of new media, digital simulation, and robotic technologies. He is on the advisory board of UCL’s Perspectives Journal and also serves the academic committee of DigitalFUTURES Association. |
Disclaimer:
All workshops will accept 100 applications MAX.